エンジブログ

Writer

クラウド・アプリケーション&ボイス部
出島 淳
[ 実現化への道 ]とりあえず走行
~ そして新たな課題へのチャレンジ 〜
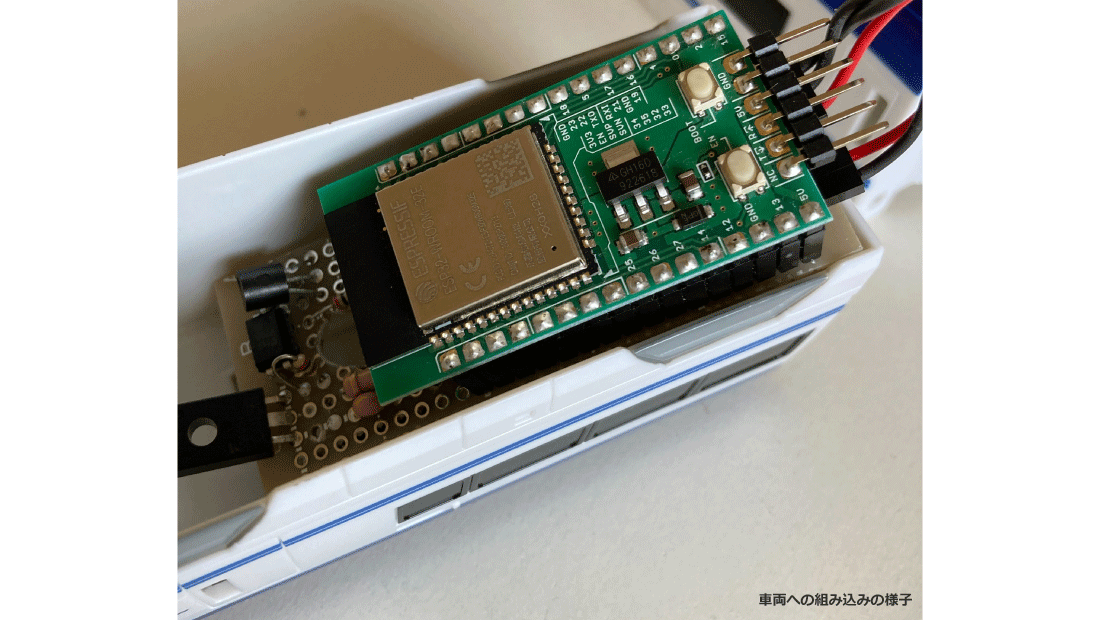
マイコンボードはギリギリだが附随車に入るサイズであった。搭載部の容積には余裕があるものの、車両のシャーシとボディを固定するためのポスト(円筒)があるため、空っぽの附随車でも見た目よりは中に余裕はなかった。特に中間車は長さが短く余裕がなかった。特に基板の幅が支配的だが、マイコンボードだけでも寸法がギリギリなので、1つの車両にはマイコンボードと電池の両方を搭載できなかった。
仕方がないので、2両目にマイコン用の電源を、3両目にマイコンボードを入れることにした。電源は単4電池2本を3.3Vに昇圧する回路を入れて動かした。(この判断は後で後悔~それが転じてホッとすることになる)
残念ながら部材のサイズとポストの位置の関係で3両目を電源、2両目をマイコンにすることは叶わなかった。3両とも部材を積むため3両編成すべての連結部に配線が必要になった。特に1両目のモーターの配線は3両目のマイコンまで持ってゆかなければならず、2両目と3両目の間にはリレーの配線とマイコンの電源の両者の配線が必要になった。固定配線では後々困るので、車両間配線はQiコネクタなどで外せるようにしたが、見た目が悪いだけでなく、後述するようにカーブでの走行性能に悪影響が出てしまった。
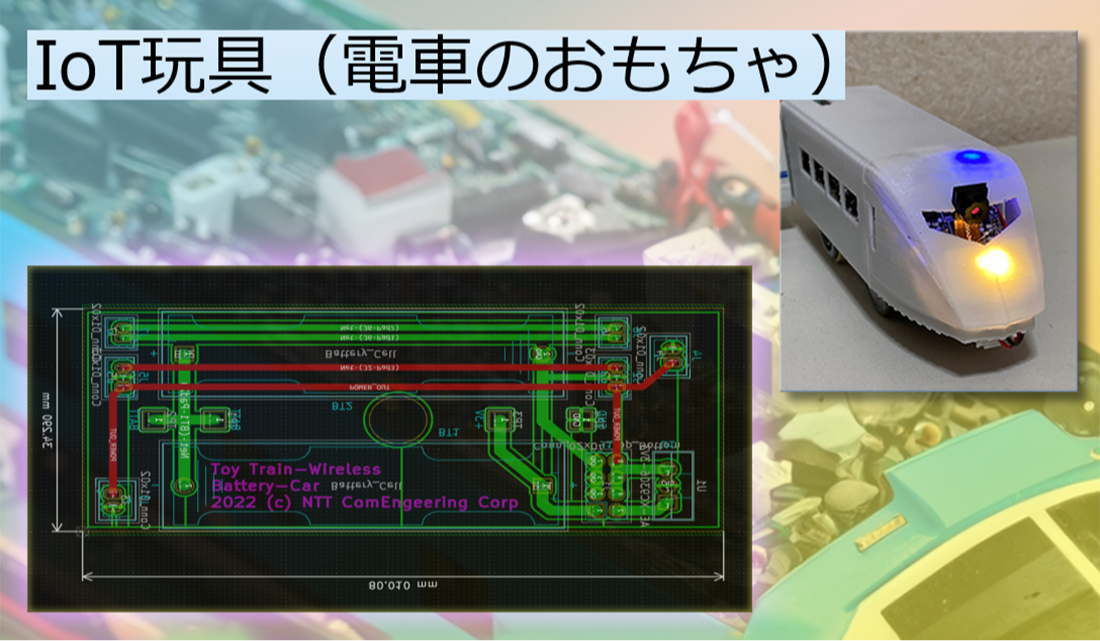
なんとか完成
これでもなんとかIoT制御の電車のおもちゃは出来上がった。配線が不格好なものの、それ以外は元の列車の姿はそのままである。ただ、実際に走らせたところ、直線では走ったが車両間の配線(コネクタ)が車両に干渉してカーブで脱線した。マイコン用電源の単4電池の持ちは非常に悪く、20分ほどで止まった。
しかし、これでも当初の低い志は果たした。思ったより早期にできたので、カイゼンマインドが沸々と湧いて出てきた。それだけではない、この営みを社内で話したところ、クリスマスに子供を集めて遊んでもらうイベントに供しようということになった。課題をクリアしながら、複数セットを製作し、それが同時に正常に稼働しなければならないということになった。イベントでは子供たちに簡単な組み立てをしてもらうことにもなった。安全で失敗しない組み立て体験をしてもらうためのおぜん立ても必要になった。

上手くいくと欲をかきたくもなる
低空飛行のままでも良いのだが、プロジェクトにしてもプロダクトにしても一度動き出すといろいろと欲が出てくる。工夫したくなる。
車載カメラ、走行音、ライト、速度制御、自動制御…。M5シリーズのWebカメラが手元にあったので載せてみようということになった。ライトも実装が簡単そうなので載せることにした。ライトはモータ制御のリレーの要領でLEDを点灯させればいいので電気的・ソフトウェア的な実装は簡単だった。速度制御はリレーを2式にして適当な抵抗器を直列に入れたり切ったりすればいいことが分かった。本物の〇〇〇ライナーはVVVFインバータ制御だろうが、おもちゃのこの車両はかつての電車とおなじ抵抗制御となった。ローテク回帰といったところ。抵抗バイパス用のリレーを1個だけ乗せた。これで2種類の走行速度が選べるようになった。
車載カメラは物理的に乗せればいいと思ったので、たいしたことないと思われた。しかし、実のところライトのほうは3両目~1両目の配線の増加をもたらし、車載カメラはもともと余裕のない1両目への搭載ということで課題山積だった。カメラは電池を搭載しているので物理的に搭載すればよいと考えていたが、カメラの電池自体も連続動作時間20分がいいところだった。
次回、立ちはだかる課題。
Share