エンジブログ

Writer

クラウド・アプリケーション&ボイス部
大野 理望
3D CADツール
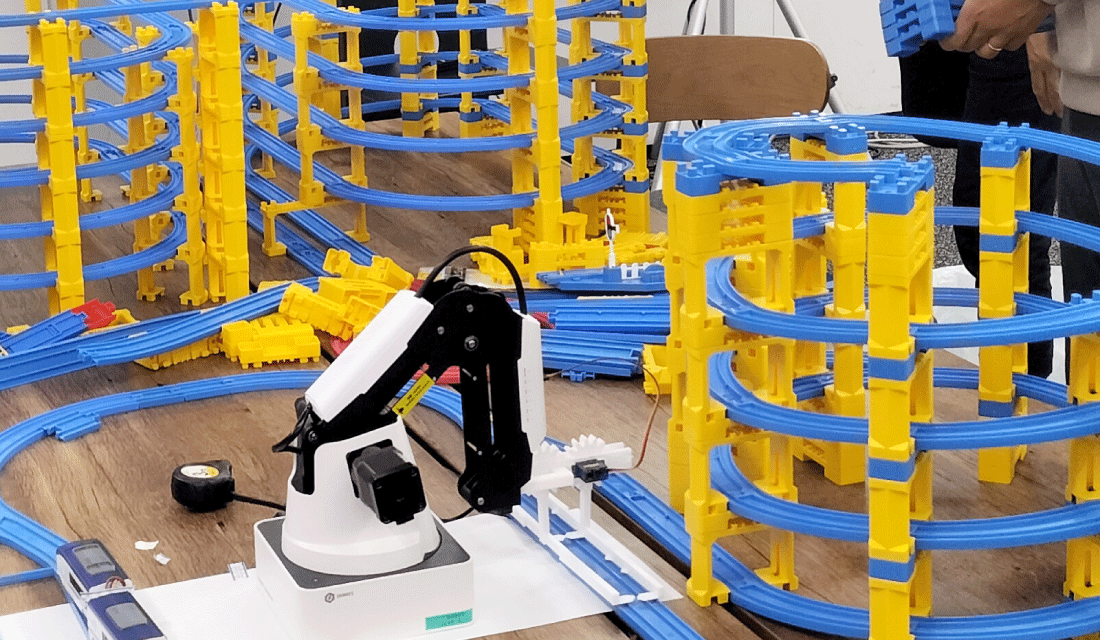
前回、ロボットアームで電車のおもちゃを持ち上げるアイデアでグリッパー(掴む先端部分)が合わないという話題でした。
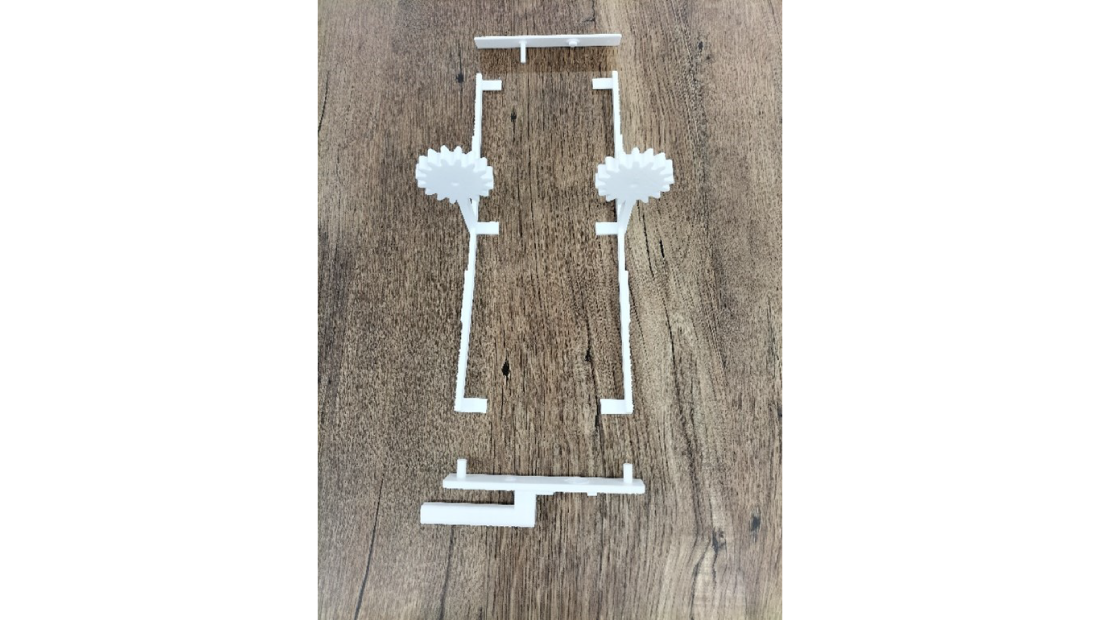
「無いなら自作」ということで3Dプリンタの試作を開始。
FreeCADというフリーのCADツールで図面を引きます。
3D CADなんてこれまで使ったこと無かったですが、YouTube動画を見ながら数時間さわっていたら簡単な物体は設計できるようになりました。自由曲線で立体を設計するのはかなり大変ですが、立方体や円柱など基本図形が用意されていてそれらを組み合わせであれば、そこまで複雑な操作ではありません。Free CADでは「Part Design – Involute gear」という歯車を簡単にデザインできるツールも標準で備わっています。
完成し試作第一号がこちら。
ロボットアームの操作プログラム
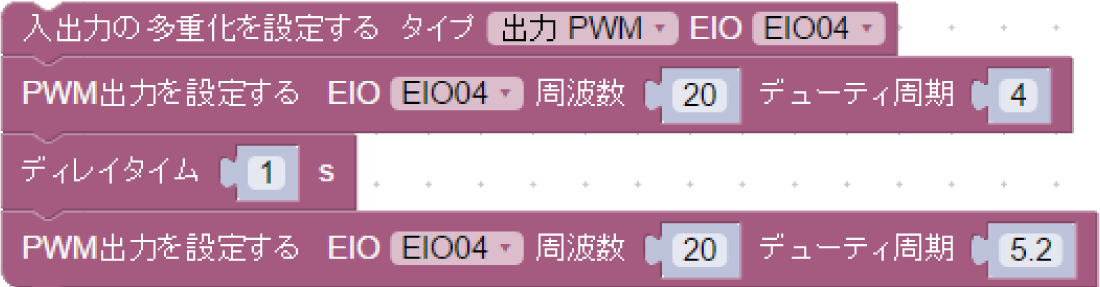
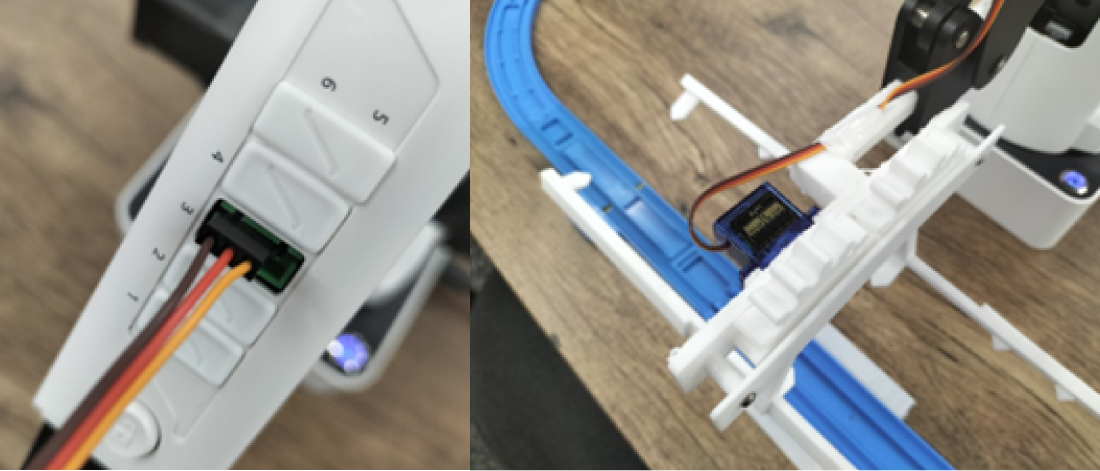
自作グリッパーのサーボモーターはDobot Magicianの外部I/Fに接続します。Dobot Magicianに接続することでDobot Magicianのロボットアームの操作プログラムから一連の動きの中で制御することができます。
下記の例のように「出力PWM(信号)※」を選択することでサーボモーターの制御を行えるようになります。「デューティ周期※」はサーボモーターの動作角度でこの数値を調整して開閉を制御します。
[外部サーボモーターのI/F初期設定と動作サンプル:Blockyスクリプトの例]
[外部サーボモーターとDobot Magician I/F接続]
試作第一号の持ち上げ成功率は30%程度。
車両の下部にうまくアームの爪を入れる部分、歯車部分のがたつきがあり掴みが甘い部分に改善の余地がありそうです。
動作動画は次回掲載します!
※PWM(信号):Pulse Width Modulationの略。信号のパルス幅を変調させることによってモーター等を制御する方式。
※デューティ周期:Dobot Magicianツール上はデューティ周期と表示されているが、一般的にはデューティ比とも呼ばれる。PWM信号において、信号周期における高いパルス値と低いパルス値の長さの比率。
Share